



Understøtter indgangsspænding 10 ~ 30VDC
Fuldt kompatibel med ISO 11898-2 standarden
1 x RJ-45 Ethernet interface
2 x CAN-bus 9-polet D-sub-stik
Mekanisk valg af CAN bus Baud Rate
Understøttelse af CAN-bus ID-filterfunktionen
Support til CAN bridge
CAN-bus-monitoring
CAN Baud Rate fra 10kbps til 1Mbps
Modbus TCP Client / Server funktionen via konfiguration
Support til TCP/UDP CAN pair forbindelse
Bootloader til firmwareopdateringer
Forsyningsspænding: 10 - 30VDC
Driftstemperatur: -25 til + 75°C
Mål: 147 x 107 x 26 mm
ETH-CAN2-MOD-GW modulet er en Modbus TCP til 2-ports CAN Bus Gateway, hvilket betyder, at modulet nemt kan integreres med et industrielt netværk. ETH-CAN2-MOD-GW har 2 CAN bus interfaces, hvilket betyder, at flere forskellige CAN-applikationer kan understøttes, såsom en CAN-bridge (bro) eller en CAN message router, som betyder, at ETH-CAN2-MOD-GW kan bruges til at forbinde til 4 forskellige CAN-netværk, så de kan kommunikere med hinanden.
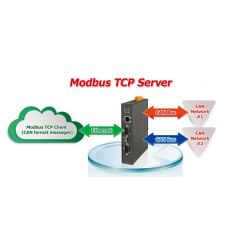
Modbus TCP Server funktionen bruges til at implementere kommunikation mellem en CAN-enhed og en Modbus TCP-klient. Når ETH-CAN2-MOD-GW er Modbus TCP Server, skal Modbus TCP-klienten bruge Modbus-kommandoer baseret på CAN-formatet for at få adgang til ETH-CAN2-MOD-GW.
ETH-CAN2-MOD-GW oversætte disse kommandoer til meddelelser i CAN-format og sende dem til CAN-netværkene.
På samme måde, når en meddelelse i CAN-format modtages fra CAN-netværket, oversætter ETH-CAN2-MOD-GW meddelelsen til Modbus-format, som derefter kan tilgås ved hjælp af en Modbus-kommando.
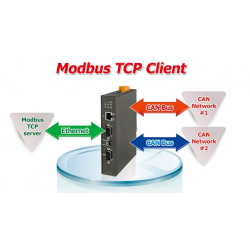
Modbus TCP Client funktionen bruges til at implementere kommunikation mellem en CAN-bus og en Modbus TCP-Server. som kan det få adgang til Modbus TCP Sserveren via kommandokonfigurationen. Når ETH-CAN2-MOD-GW modtager I/O-data, vil det videresende dem til de eksterne CAN-enheder til analyse, kontrol eller andre operationer. Når ECAN-240-modulet er konfigureret, er det også i stand til at få adgang til Modbus TCP-serveren via en CAN-meddelelse.
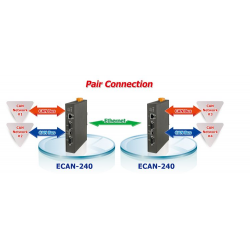
Pair forbindelse er til kommunikation mellem 2 ender af CAN netværket. CAN Network #1 kan kommunikere med CAN Network #3 eller CAN Network #4 ved hjælp af parforbindelseskonfiguration. På samme måde kan CAN Network #2 også kommunikere med CAN Network #3 eller CAN Network #4 på samme måde. Pair forbindelsen på ETH-CAN2-MOD-GW implementeres via enten TCP- eller UDP-protokollen.

Kompakt Modbus/TCP til RTU/ASCII Gateway med PoE
Skal ikke programmeres
1 x RJ45 10/100Mbps
1 x RS485/422 (skrueterminal)
Baud rate op til 115.200 bps
Self-tuner til RS485/422
Automatisk sende-/modtage-retning på RS485
IEEE 802.3af - PoE (PD)
Forsyningsspænding u/PoE: 12 - 48VDC 2Watt
DC stik er Power Jack 5,5/2,1mm
Mål: 90 x 52 x 27 mm
DIN-beslag
Driftstemperatur: -25 - +75°C

Modul B - Seriel til fiber - fiber til seriel link
Automatisk RS-485 retningskontrol
Optiske fibre muliggør transmission op til 15 km til A modulet
Undgår lynnedslag og EMI/RFI -interferens
Understøtter +10 VDC ~ +30 VDC
ESD-beskyttelse til datalinjen RS-232/422/485
DIN-skinne montering
Understøtter driftstemperaturer fra -25 ° C ~ +75 ° C

Kompakt Modbus/TCP til RTU/ASCII Gateway med PoE
Skal ikke programmeres
1 x RJ45 10/100Mbps
1 x RS232 (terminalblok) - 5-pin
1 x RS485 (terminalblok) - 2-pin
Baud rate op til 115.200 bps
Self-tuner til RS232
IEEE 802.3af - PoE (PD)
Forsyningsspænding u/PoE: 12 - 48VDC 2Watt
Mål: 90 x 52 x 27 mm
DIN-beslag
Driftstemperatur: -25 - +75°C

Seriel til HART konverter
Tillader 2 stk. HART masters
Point-to-point eller multi-drop HART mode
Mulighed for tilslutning af 15 HART moduler
Program til konfiguration af moduler
Isoleret COM 1: RS-232/422/485
PWR / RUN / ERR indication LED
Built-in Watchdog
4 kV ESD beskyttelse